Related Resources: calculators
Modified Gruebler's Equation for Kinematics Calculator
Mechanics and Machine Design, Equations and Calculators
Modified Gruebler's Equation for Kinematics Calculator
For a planar mechanism, the degree of freedom (mobility) is given by Gruebler's Equation:
In kinematics the number of mobile links is:
Gruebler's Equation - degrees of freedom (mobility)
F = 3(n – 1) – 2 f1
Modified Gruebler's Equation - degrees of freedom (mobility)
F = 3(n – 1) – 2 f1 - 1 f2
where
f1 =
Total number of pin joints (some joints count as f = ½, 1, 2, or 3)
f2 = number of roll-slide contact joints
n =
Total number of links (including a fixed or single ground link)
For example,
Example 1: Slider-crank n = 4, f1 = 4, F = 1
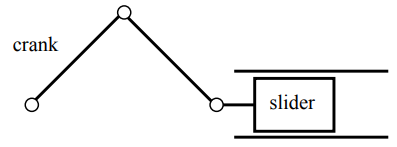
Figure 1 - 4 links (including ground), 4 joints
Example 2: 4-Bar linkage n = 4, f1 = 4, F = 1
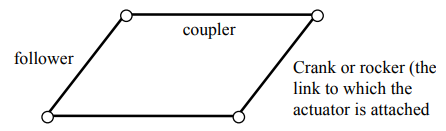
Figure 2 - 4 links, 4 joints
Source:
- Erdman, Arthur G., George N. Sandor, and Sridhar Kota, Mechanism Design, Vol. 1, 4th ed.,
New York: Prentice Hall, Inc.: - MIT, Mechanical Design Contest Presentation
Related:
- Kennedy's Theorem Rule in Kinematics Formula and Calculator
- Engineering Kinematics
- Kinematic equation for 4-bar linkage
- Theory of Mechanisms and Machines
- Theoretical Mechanics, Kinematics, Dynamics and Static's
- Mechanisms in Modern Engineering Design
- Scissor Jack Design Calculation Equation
- Scissor Lift Design and Analysis Equations, Mathematical Analysis of Scissor Lifts
Link to this Webpage:
© Copyright 2000 -
2024, by Engineers Edge, LLC
www.engineersedge.com
All rights reserved
Disclaimer |
Feedback
Advertising
| Contact